TAROS 2018 presentation
General Comments
That time of the year arrived, TAROS 2018 in its 19th iteration. This year, TAROS was brought to the beautiful and vibrant city of Bristol; and as a robotics researcher based in Bristol, I had to take part and display some of our work.
As in earlier iterations, interesting work from UK, continental Europe and increasingly from US and such gathered for some days of technical discussions and networking.


M Shed was an excellent venue for the event, allowing us to show visitors some of the best view Bristol has to offer. Overall organization was well sorted, even allowing visitors to experience the tradition local seagull going for your food. I congratulate Prof. Manuel Giuliani and his team for his effort and hard work.
Some surprises came in the form of the number of presenters from Bristol. As BRL is the biggest robotics lab in the UK, one would assume presenting in the local conference being held in the same city would be encouraged by head researchers; surprisingly, only a handful of presentations were held and posters shown. Maybe we are only pointing towards higher tier events?
The 20th version of TAROS will be held by the Queen Mary University of London, which will certainly be an interesting change of venue. Hope we can all make it 😄.
Presented Work
I went to TAROS 2018 to present some work related to my PhD, which was done together with remarkably tallented 4th year master students. I was lucky enough to co-supervise and provide technical and theoretical foundations for its implementation.
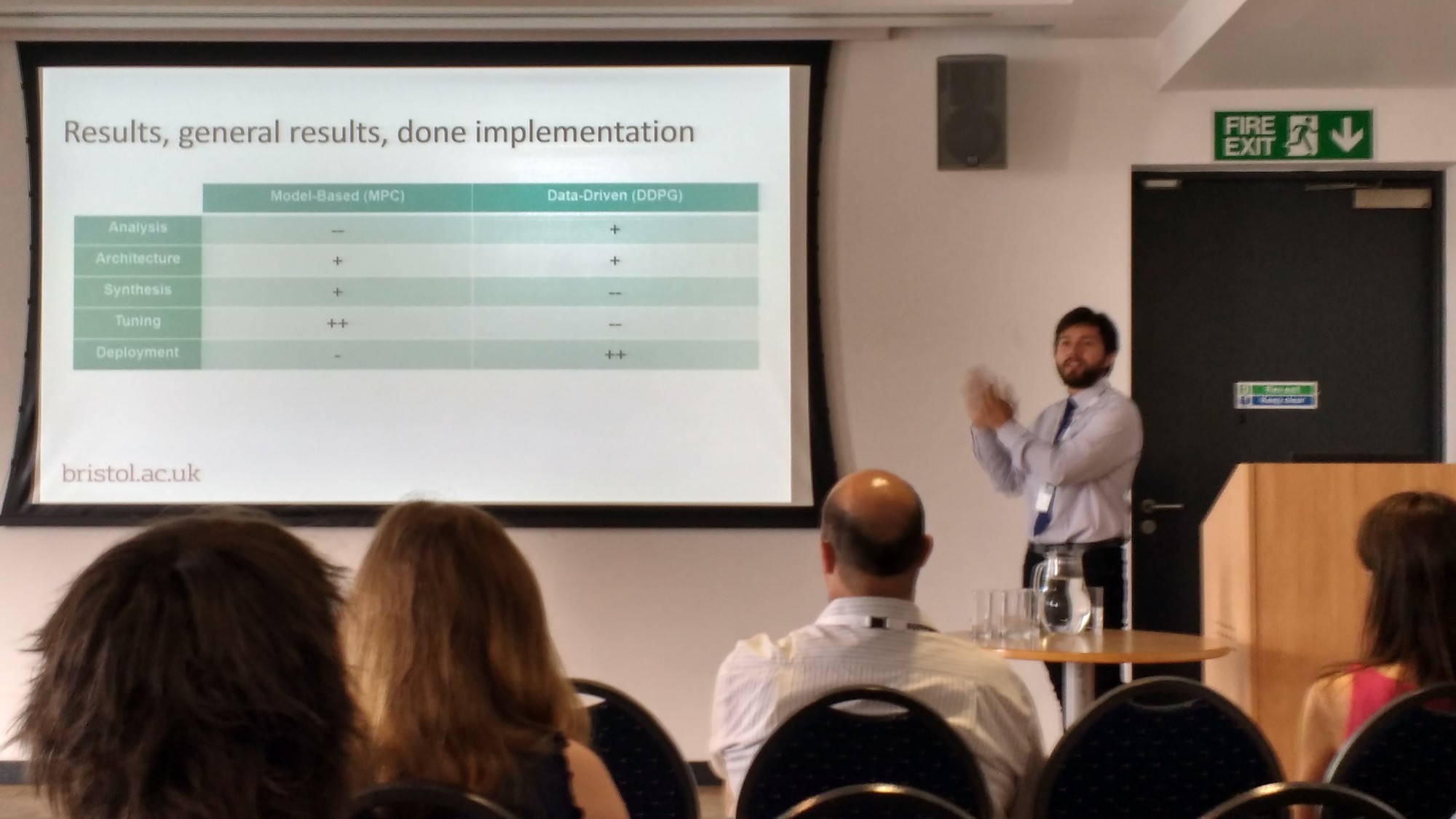
The work titled Comparing Model-Based and Data-Driven Controllers for an Autonomous Vehicle Task looked at comparing two hugely different, yet powerful and popular control frameworks, focused at the task of controlling a simulated car for an autonomous vehicle task (i.e. control take-over).
Presentation


Published Version
Published paper is available here.
Citation
Citation can be obtained from springer directly, but here is a BibTeX entry:
@inproceedings{lopez_pulgarin_comparing_2018,
series = {Lecture {Notes} in {Computer} {Science}},
title = {Comparing {Model}-{Based} and {Data}-{Driven} {Controllers} for an {Autonomous} {Vehicle} {Task}},
isbn = {978-3-319-96727-1 978-3-319-96728-8},
url = {https://link.springer.com/chapter/10.1007/978-3-319-96728-8_15},
doi = {10.1007/978-3-319-96728-8_15},
abstract = {The advent of autonomous vehicles comes with many questions from an ethical and technological point of view. The need for high performing controllers, which show transparency and predictability is crucial to generate trust in such systems. Popular data-driven, black box-like approaches such as deep learning and reinforcement learning are used more and more in robotics due to their ability to process large amounts of information, with outstanding performance, but raising concerns about their transparency and predictability. Model-based control approaches are still a reliable and predictable alternative, used extensively in industry but with restrictions of their own. Which of these approaches is preferable is difficult to assess as they are rarely directly compared with each other for the same task, especially for autonomous vehicles. Here we compare two popular approaches for control synthesis, model-based control i.e. Model Predictive Controller (MPC), and data-driven control i.e. Reinforcement Learning (RL) for a lane keeping task with speed limit for an autonomous vehicle; controllers were to take control after a human driver had departed lanes or gone above the speed limit. We report the differences between both control approaches from analysis, architecture, synthesis, tuning and deployment and compare performance, taking overall benefits and difficulties of each control approach into account.},
language = {en},
urldate = {2018-08-07},
booktitle = {Towards {Autonomous} {Robotic} {Systems}},
publisher = {Springer, Cham},
author = {Lopez Pulgarin, Erwin Jose and Irmak, Tugrul and Paul, Joel Variath and Meekul, Arisara and Herrmann, Guido and Leonards, Ute},
month = jul,
year = {2018},
pages = {170--182},
}
Erwin Lopez
Research Associate in Perception, Decision and Actions for HRI
My research interests include control, robotics, HRI and embedded systems.